霍夫变换实际上只是能够检测图像上的形状的一种手段。他的实现方式是将图像转换为霍夫空间,然后,再从霍夫空间当中的数据来得出所需要的形状是否在图像上存在,存在多少。
实际上,霍夫变换也只是一种类似穷举法的解决方案。
霍夫直线检测
基本原理
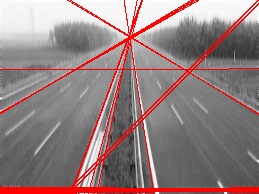
直线检测,正如其名,就是检测图片当中可能存在的直线。
就如同上图所示,一条直线,只能是对应于图像当中的一个唯一的一元一次方程$y=kx+b$,那么,想要计算图片是否存在这样的直线,那么我们只需要那一组唯一的一元一次方程即可。
这就是霍夫直线变换。
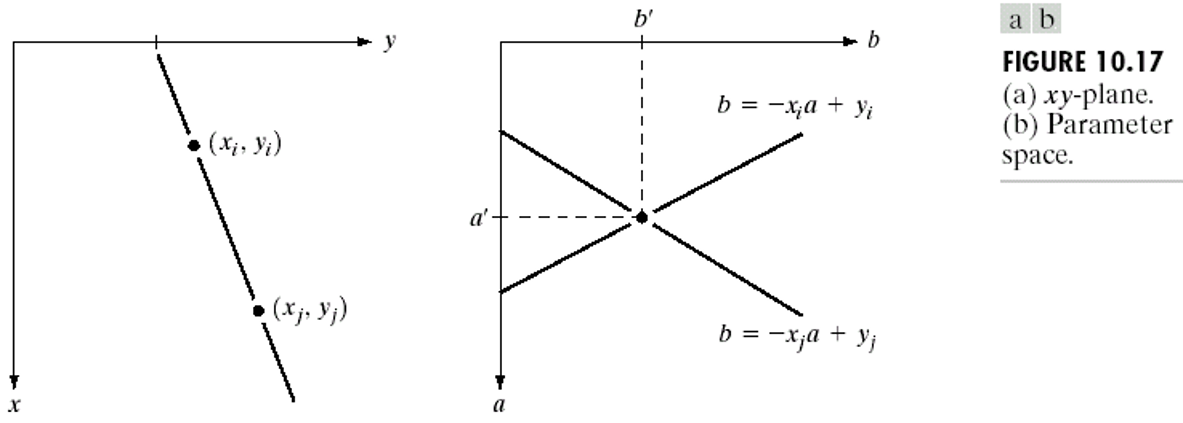
那么我们可以怎么算呢?我们可以这样,对于图片上每一个目标点都计算其所有可能的k与b,那么,只要当我们计算出来所有的目标点的所有的k与b,重合度最高的一组k与b就可以看作为一条直线了。(因为,只有组成直线的两个点之间的k与b是一样的,其他k与b都是离散的)
但是这样我们们会有一个问题,k与b的取值的范围怎么设定呢?理论上,k与b的取值范围都是无限的,而计算机注定是无法计算无限的数值的,因此,我们需要一种新的方式去代替k与b,使之拥有取值范围。
这个时候,极坐标公式就是我们的一个很好的选择了。
其中的$r$是图片半径(也就是对角线的长度)
拥有了取值范围,那么我们就很好的计算了,比较有了取值范围,剩下的问题就只是取值的精度而已。
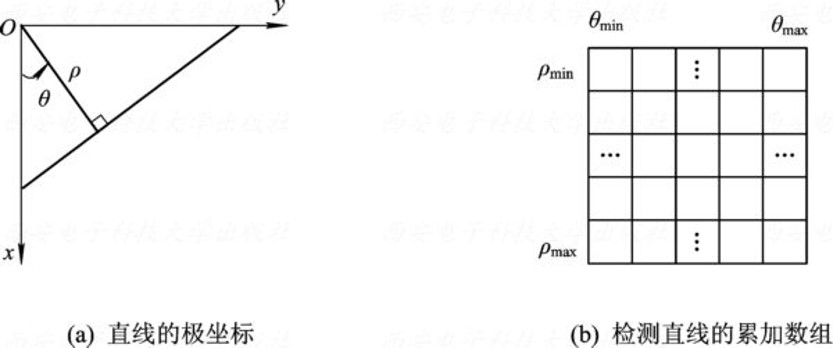
极坐标公式所对应的直线方程可以理解为这样
那么,我们只要将$\theta$从0到$\pi$都取一遍,就可以取到以这条直线为原点,绕其360度的所有的直线了。也就是我们之前所说的取k与b的所有的取值的一种替代方式了。
那么,我们就可以得出一个检测直线的累加数组了。而数组当中最多的位置,就可以看作是一条直线了。
霍夫的直线检测的检测路线可以总结为这样:
1,对图片进行滤波,取边缘点等预处理
2,将图片二值化,以便于计算
3,建立一个2 r 180长的霍夫空间(在这里取2 * r是因为,当theta取值大于90的时候,计算出来的r为负数,因此,需要对这个结果进行一下处理)
4,对于每一个目标点
1 | if f(x,y) == 1 |
5,对于霍夫空间当中的点,若其大于一定的阈值,就视为一条直线,然后,我们就可以将直线画出来了(在这里我是将其mark为255)
1 | p = x * cos(theta) + y * sin(theta) + r |
代码实现
这里的数据结构有很多我自己所封装的东西,但是,具体的算法流程还是很清晰的在这里展示了。
1 | ImageUtil::IMGDATA hough(ImageUtil::ImageData data, const double deltaSigma) |